Everything under control - digital control for high precision robots.
PRODUCTION TECHNOLOGY, DRIVE CONTROL, FLEXMATIK
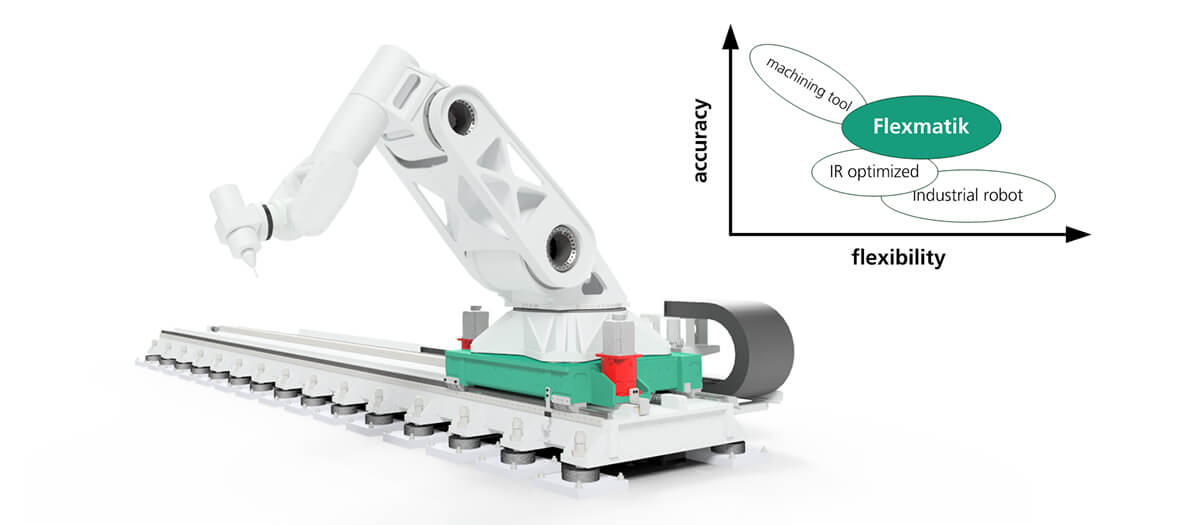
The production of the future is highly flexible, energy- and resource-efficient. Future production and value-added processes will be strongly affected by robots based on serial multi-axis kinematics. In the case of path-guided machining processes, the smallest machining tolerances have to be guaranteed from the very first component. The achievable path accuracy and insensitivity to external disturbances depends significantly on the drive controls used.
Higher path accuracy for minimum machining tolerance
Conventional industrial robots are often used at present for handling tasks and have not yet achieved widespread adaptation in machining processes due the high precision requirements. However, due to inexpensive kinematics, the large workspace and universal application possibilities, using robots in machining technology offers huge potential for future applications. As part of the Fraunhofer joint project on market-oriented preliminary research “Flexmatik 4.1”, Fraunhofer IPK (Berlin), Fraunhofer IFAM (Stade) and Fraunhofer LBF in Darmstadt are developing a robot for machining lightweight materials such as aluminum and CFRP. One of the fundamental challenges here is improving the achievable path accuracy and the directly associated machining tolerance.
In addition to the structural dynamic properties of the individual arm elements, the bearing stiffness in the link points of the arm elements and the sensor technology used, the drives themselves have a major influence on the accuracy achievable. This is particularly the case when direct drives are used to drive the individual axes. Digital controllers are generally used to control the drive axes so as to provide maximum flexibility, potential integration of additional monitoring mechanisms and insensitivity to environmental influences. Often only the dynamics of the drives and the connected mass moment of inertia of the following arm elements are taken into account when designing the cascade controller.
Flexible and accurate!
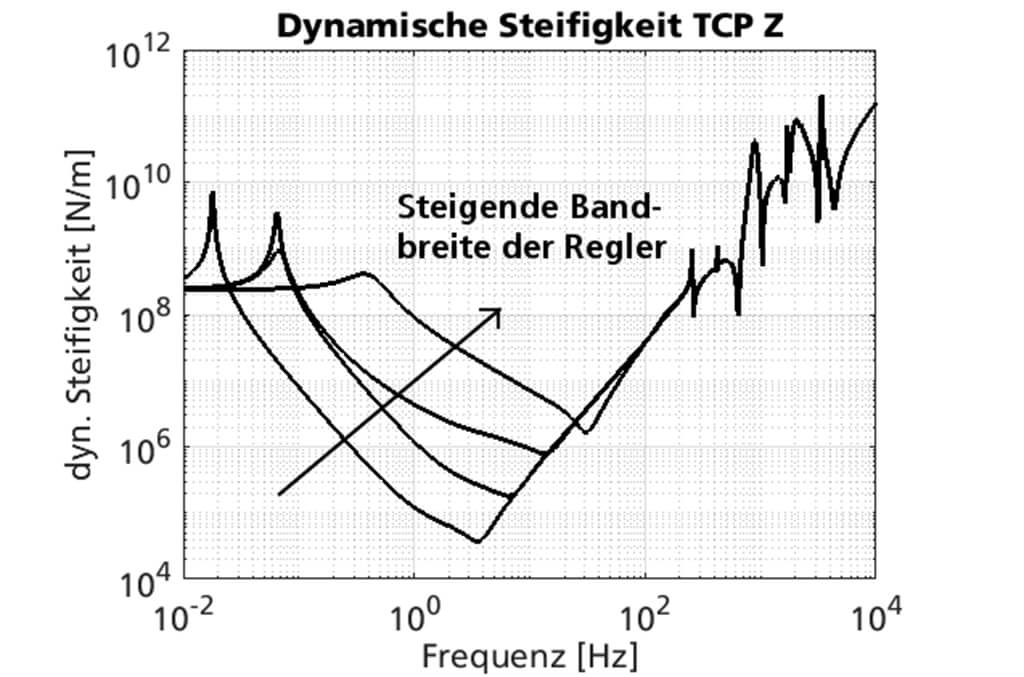
As part of the “Flexmatik 4.1” project, a flexible model-based development environment was implemented for high-precision drive controllers. Here, the flexibility of the robot’s arm elements can be taken into account at an early stage of development by integrating modally reduced FE models. It is possible by combining these modally reduced arm elements in the Simpack multi-body simulation environment, integrating the bearing stiffness between the arm elements and subsequently transferring the model to Matlab/SIMULINK to investigate optimized control approaches in addition to different drive variants. At the same time, all significant influences of the time-variant-controlled closed loop system can be taken into account in the overall system simulation at an early stage of the system design. In particular, high-bandwidth digital control systems can significantly improve path accuracy during the machining process and the insensitivity to external disturbances.
The model-based design of digital controllers for use in robotics can significantly benefit from a holistic simulation approach. High model accuracy during early stage control design and high-bandwidth digital signal processing allow for the fulfillment of accuracy requirements in machining processes.

Future production will be strongly affected by robots based on serial multi-axis kinematics. These robots allow for highly flexible use in different production processes. These robots, however, have not achieved widespread adaptation in machining processes due the high precision requirements. Within the ongoing Fraunhofer joint project “Flexmatik 4.1” conducted by Fraunhofer IPK (Berlin), Fraunhofer IFAM (Stade) and Fraunhofer LBF in Darmstadt, an optimized robot for machining lightweight materials (e.g. aluminum or CFRP) is being developed from scratch. As digital control design shows a huge influence on achievable path accuracy, the Fraunhofer researchers have set up a holistic simulation environment for early stage control design, taking into account the dynamic stiffness of the links, the characteristics of the bearing elements, the dynamic behavior of the electrical drives and the parasitic properties of digital signal processing.
This research project is a joint project between Fraunhofer IPK, Fraunhofer IFAM and Fraunhofer LBF, funded by the Fraunhofer-Gesellschaft as part of the Fraunhofer “market-oriented, strategic preliminary research”.
Contact
- Jonathan Millitzer, B.Sc.
- Phone: +49 6151 705-8218
- jonathan.millitzer@lbf.fraunhofer.de








